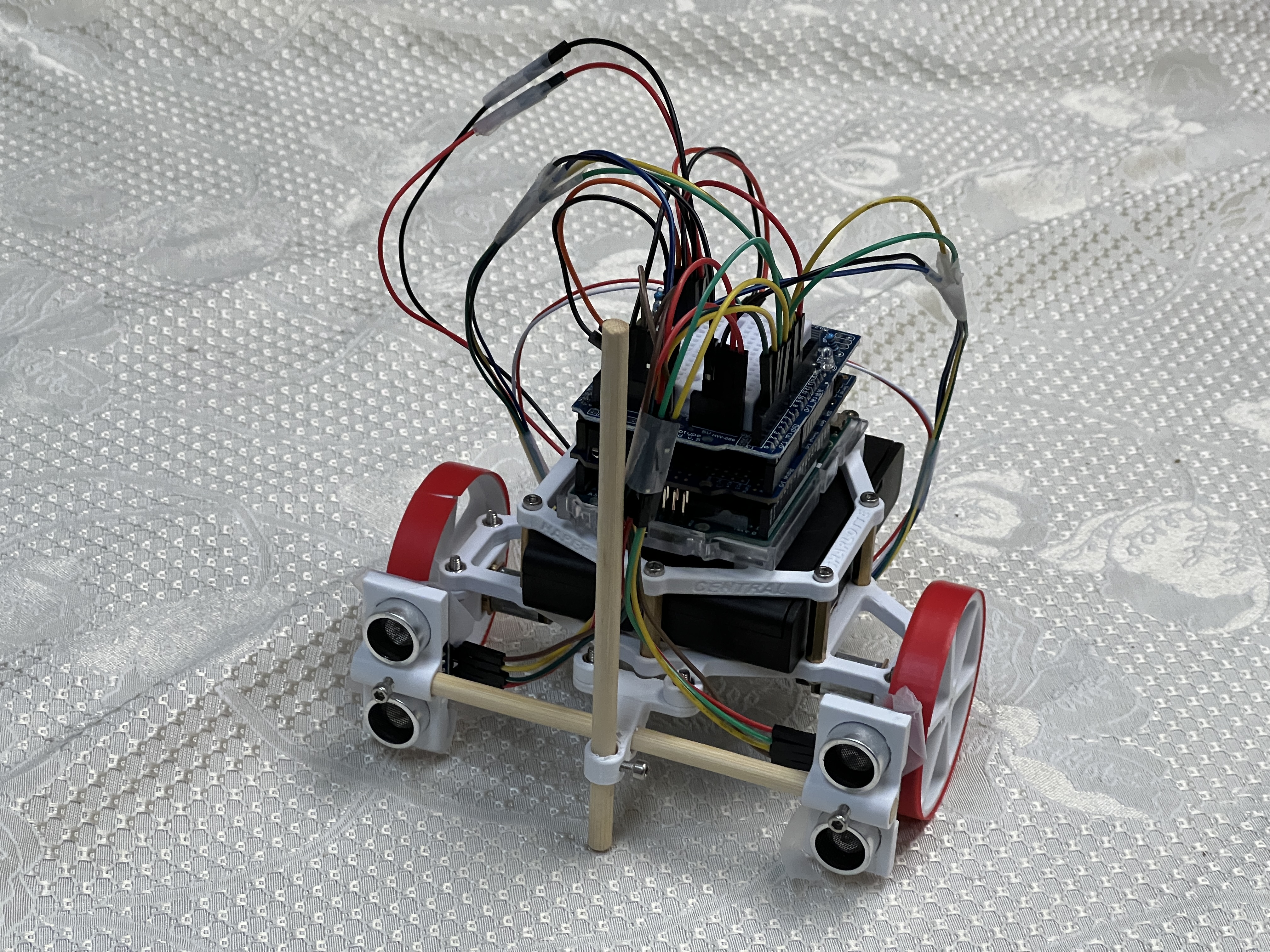
Designed for Science Olympiad’s Robot Tour event. It runs on an Arduino-style RP2040 board with cheap ultrasonic sensors, an IMU, and wheel encoders for localization and dead reckoning. I briefly experimented with optical flow sensors as well.
The 3D printed chassis was designed with three goals in mind: easy access to all electronics, compact size to avoid hitting walls, and modularity to easily iterate on the hardware.
It won 1st at the 2024 COD Regionals and 4th place at the ISO State competition.