Projects
What I've been working on

High-usability quadcopter platform for UAVs@Berkeley
Ongoing
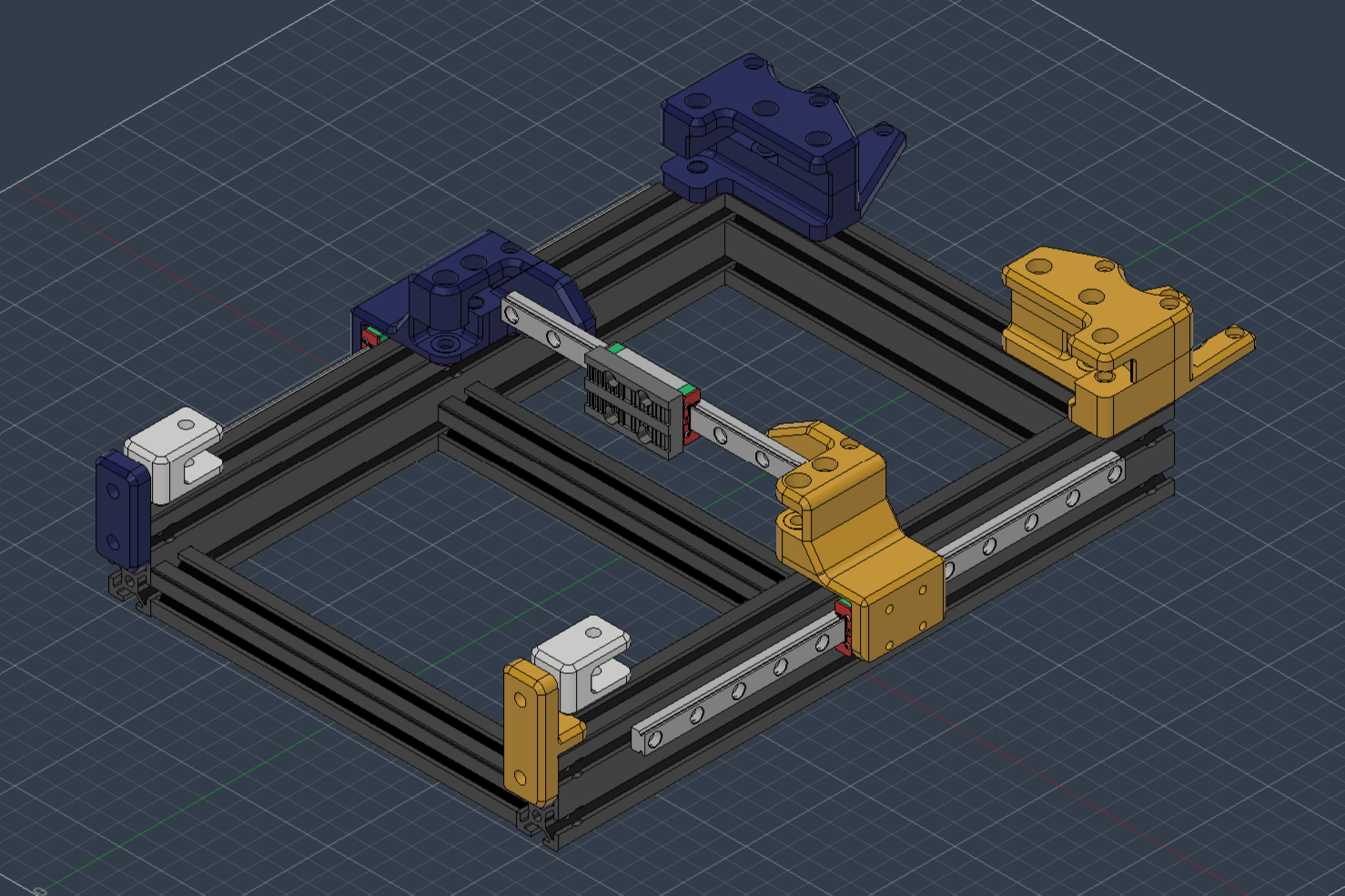
CoreXY stylus-manipulator to play GamePigeon word games

Three generations of autonomous sailboats for the Theoretical and Applied Fluid Dynamics Laboratory
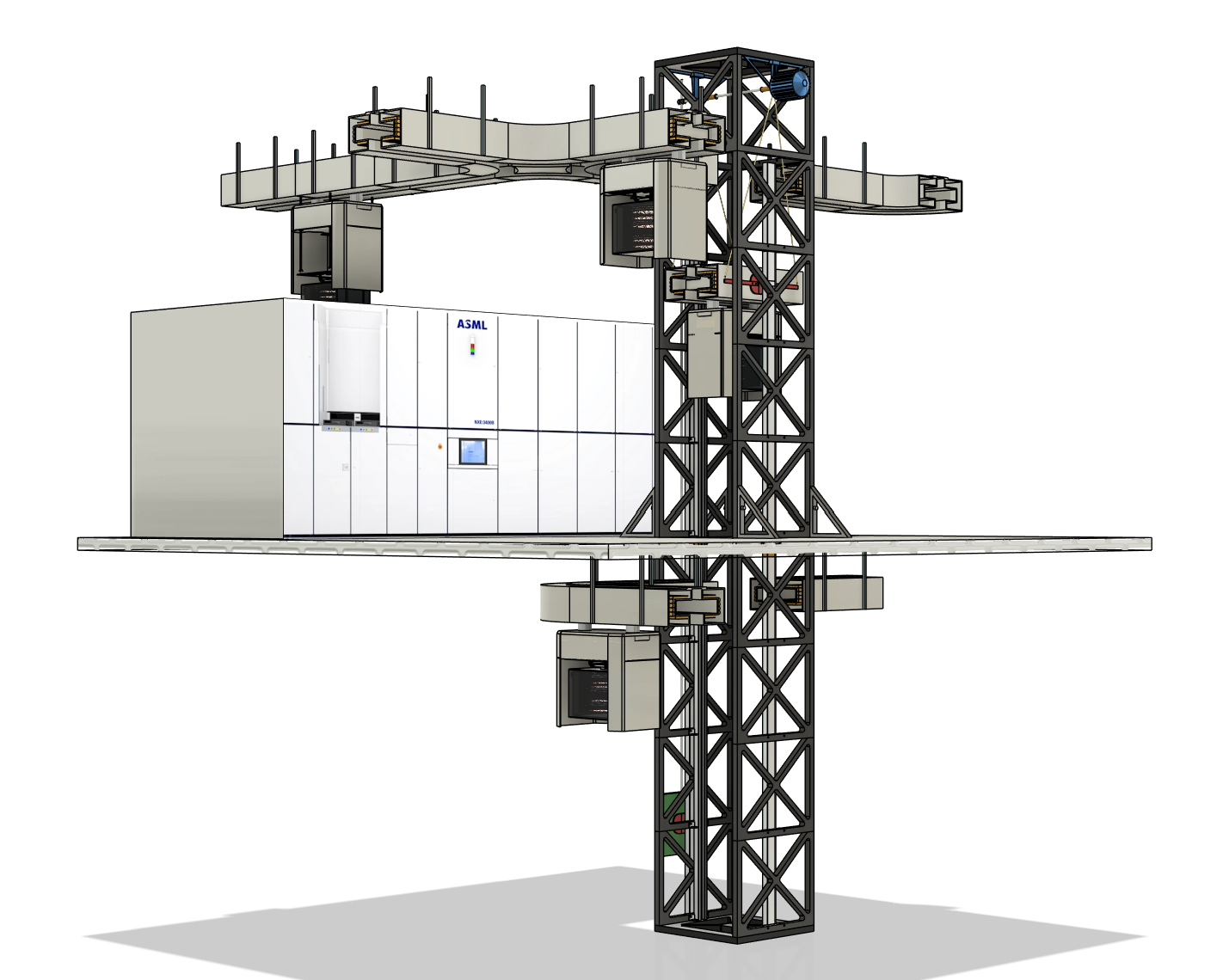
Overhead hoist transport concept for semiconductor fabs for the Spring 2025 Berkeley ASME CADathon
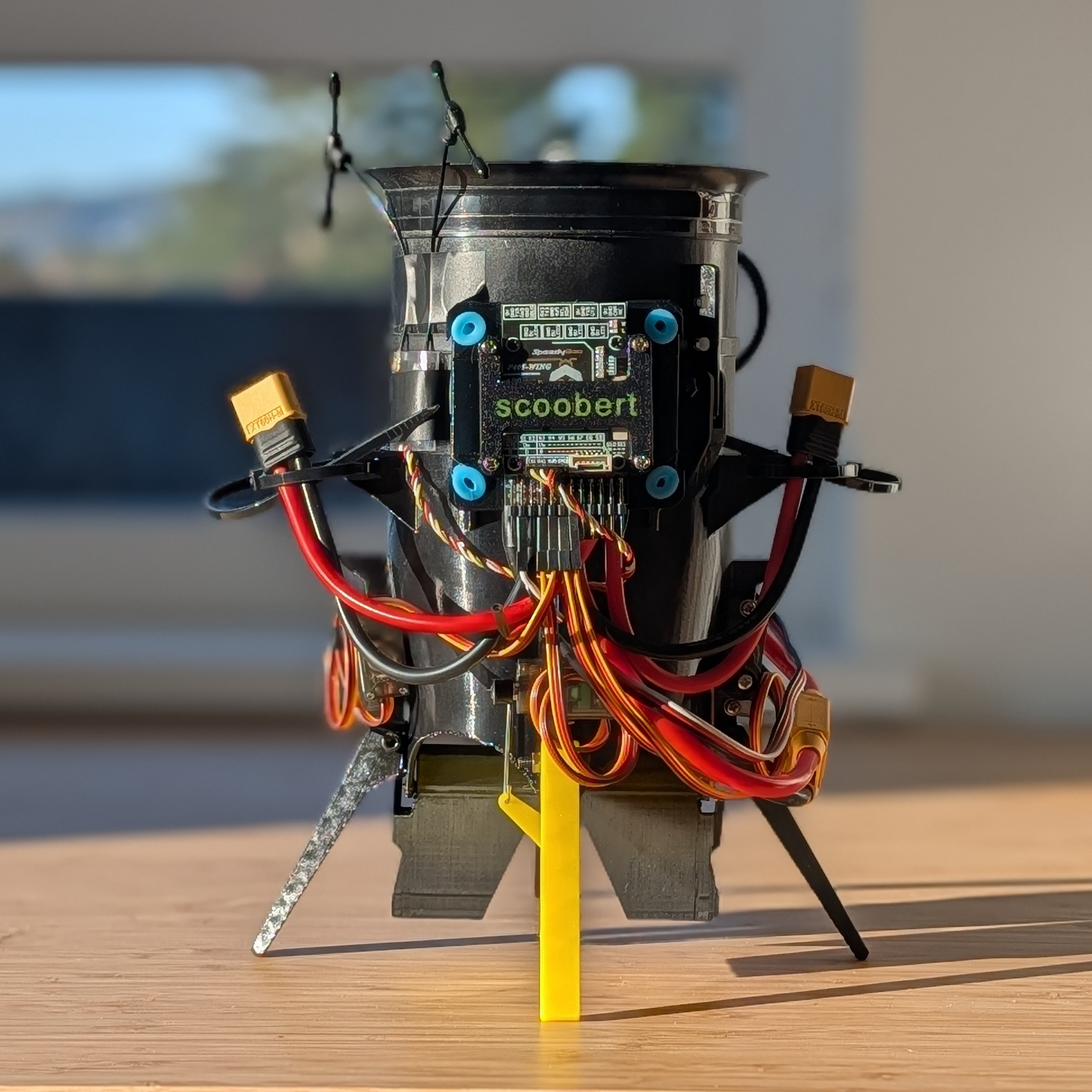
A thrust vectoring EDF VTOL vehicle
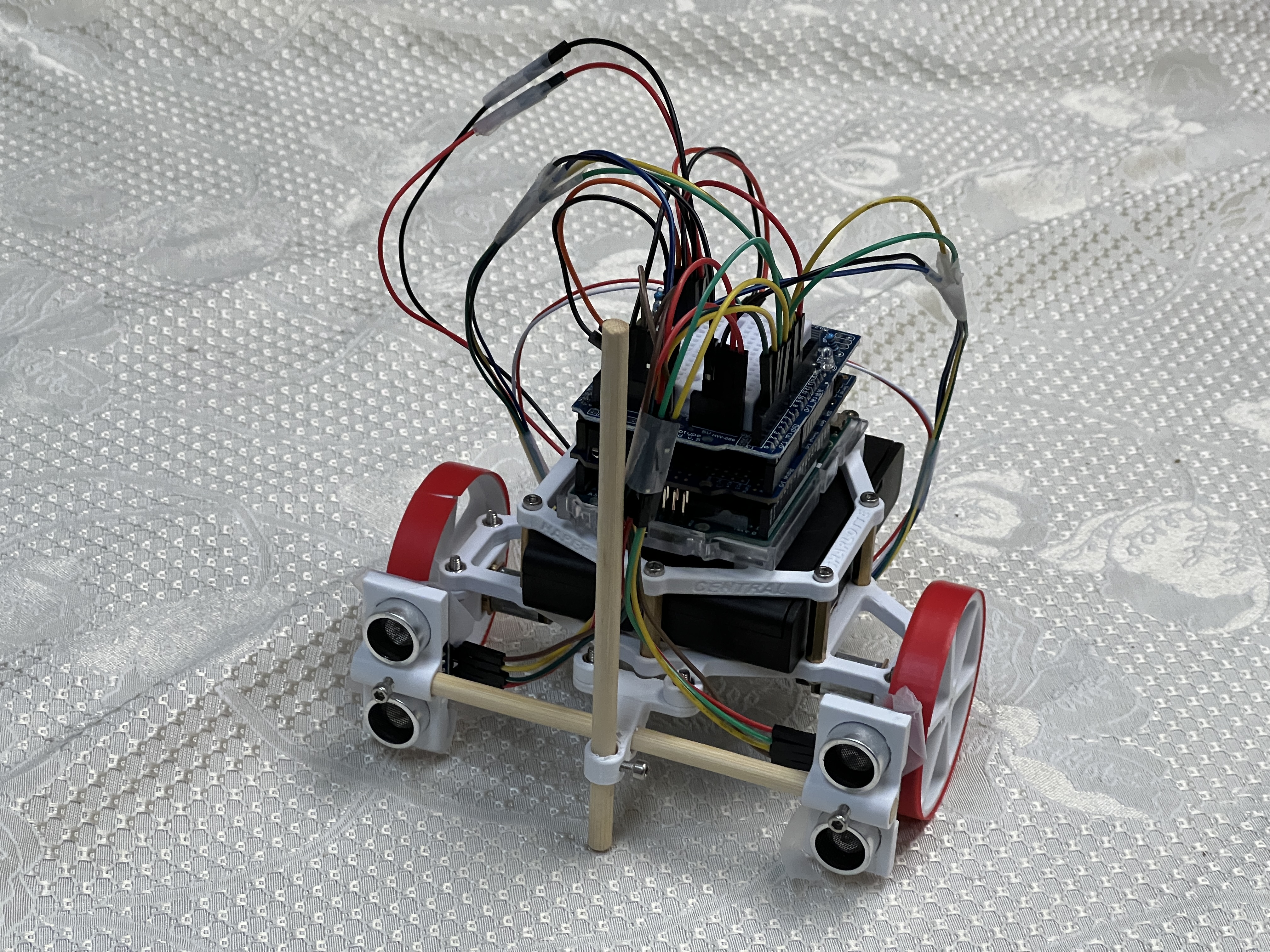
Science Olympiad Robot Tour robot with low-level SLAM and modular chassis
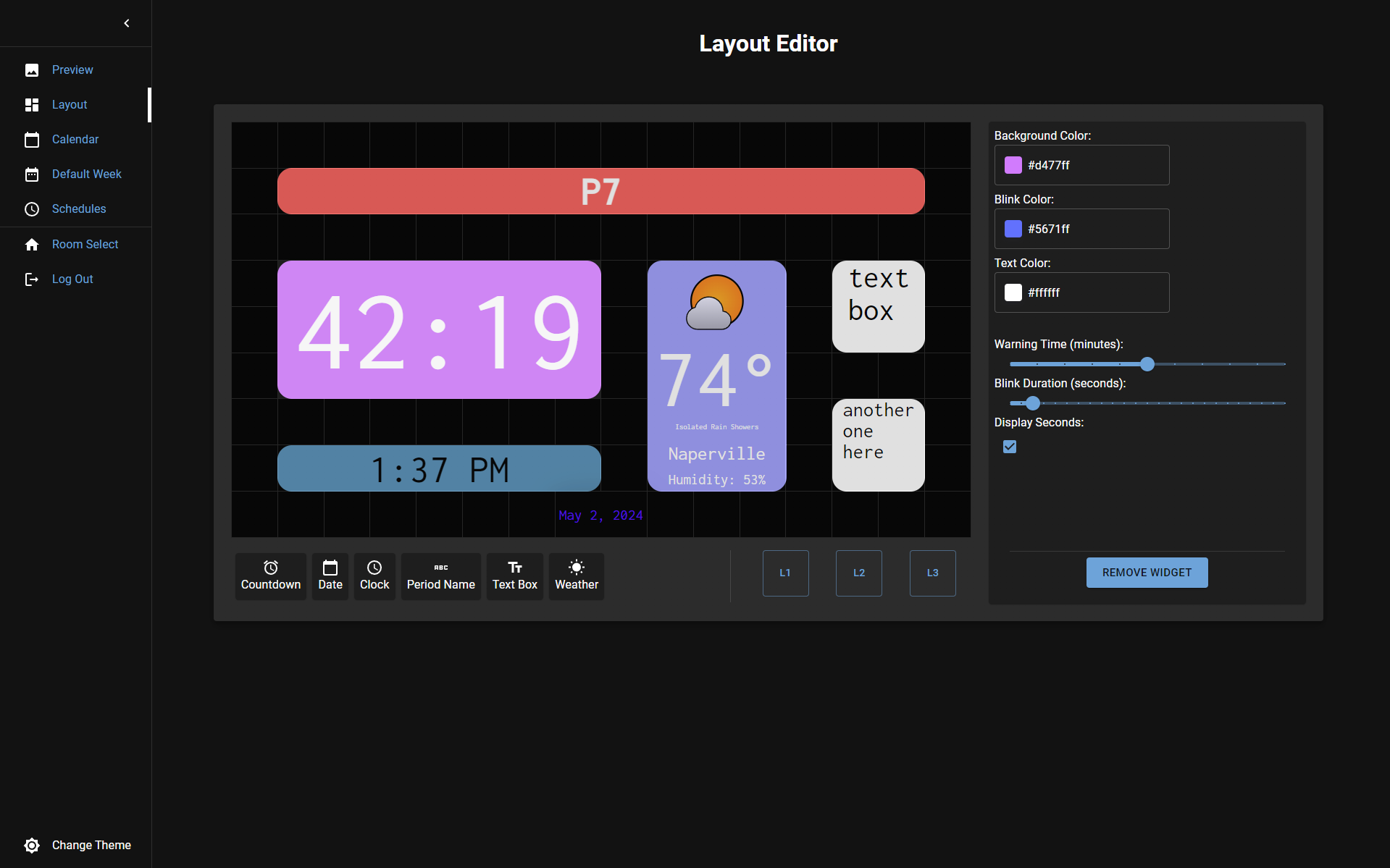
Scheduling webapp for bell schedules and classroom displays
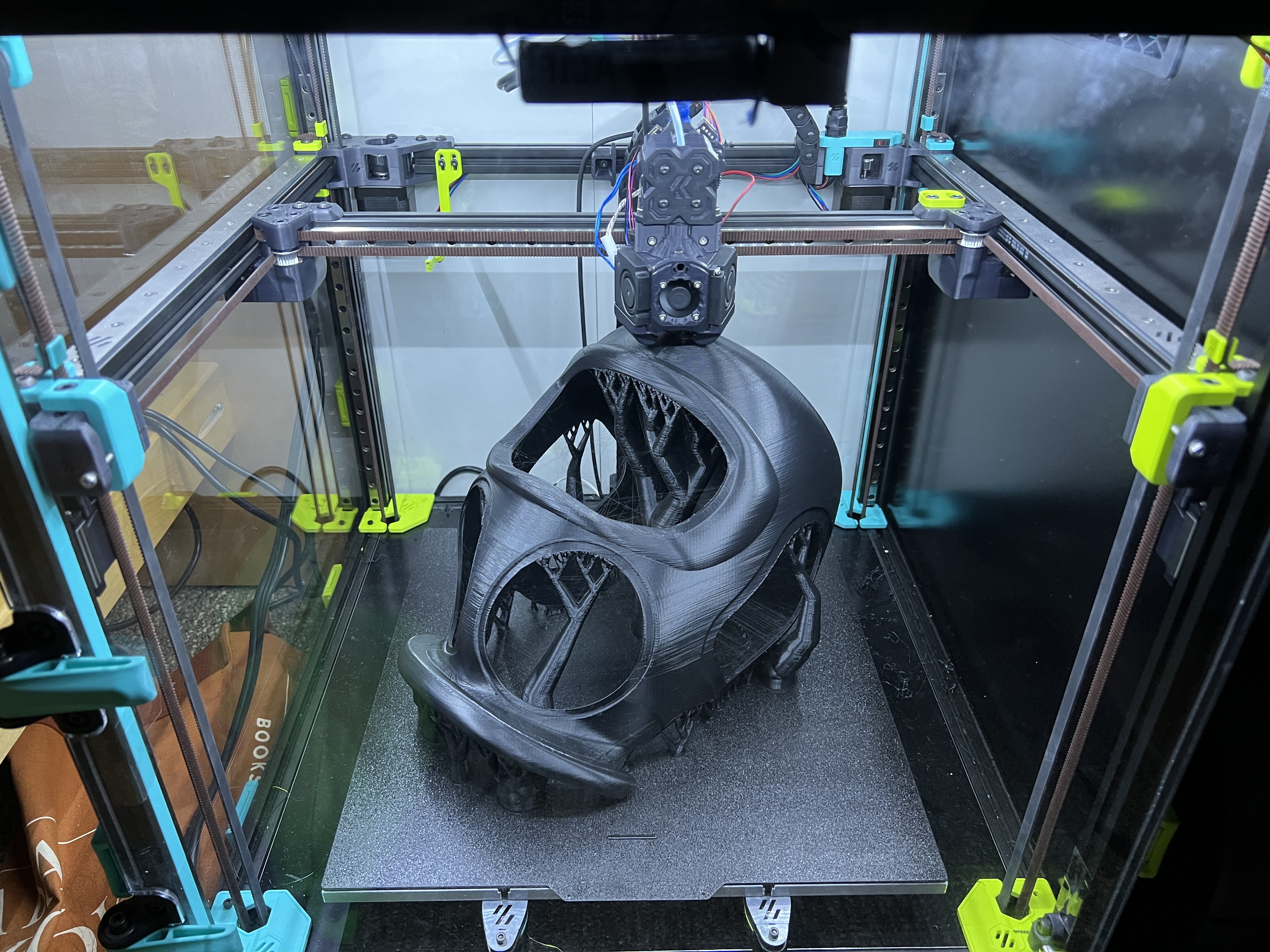
Heavily modified 350mm Voron 2.4 CoreXY FDM 3D printer